在大規(guī)模集成電路(VLSI)設(shè)計(jì)中,復(fù)位電路是確保芯片從初始狀態(tài)開始正確、穩(wěn)定運(yùn)行的基石。它不僅是芯片上電后的首個(gè)關(guān)鍵操作,也是在系統(tǒng)出現(xiàn)異常或需要重啟時(shí)恢復(fù)功能的保障。隨著工藝節(jié)點(diǎn)不斷演進(jìn),芯片集成度與復(fù)雜度呈指數(shù)級(jí)增長,復(fù)位電路的設(shè)計(jì)面臨著前所未有的挑戰(zhàn),其性能與可靠性直接影響著整個(gè)系統(tǒng)的成敗。
復(fù)位電路的核心作用與基本架構(gòu)
復(fù)位電路的主要功能是初始化芯片內(nèi)部所有時(shí)序邏輯單元(如觸發(fā)器、寄存器)到一個(gè)已知的、確定的狀態(tài)。一個(gè)典型的復(fù)位系統(tǒng)通常包含以下部分:
- 復(fù)位信號(hào)生成器:通常是一個(gè)上電復(fù)位電路,監(jiān)測電源電壓,在電壓達(dá)到穩(wěn)定閾值后才產(chǎn)生有效的復(fù)位信號(hào),避免因電源爬升過程中的毛刺導(dǎo)致邏輯誤動(dòng)作。
- 復(fù)位信號(hào)分布網(wǎng)絡(luò):將全局復(fù)位信號(hào)低偏斜、低抖動(dòng)地傳遞到芯片各個(gè)角落的數(shù)百萬甚至數(shù)十億個(gè)時(shí)序單元。
- 局部復(fù)位同步與去抖:在時(shí)鐘域交界處,對(duì)復(fù)位信號(hào)進(jìn)行同步處理,防止亞穩(wěn)態(tài)傳播;同時(shí)濾除可能由噪聲引起的短暫復(fù)位脈沖。
傳統(tǒng)的復(fù)位設(shè)計(jì)多采用異步置位/復(fù)位(Asynchronous Set/Reset)的觸發(fā)器,并搭配全局復(fù)位樹。這種方法在納米級(jí)工藝下面臨嚴(yán)峻考驗(yàn)。
現(xiàn)代VLSI設(shè)計(jì)中復(fù)位電路面臨的主要挑戰(zhàn)
- 功耗與面積開銷:龐大的復(fù)位分布網(wǎng)絡(luò)本身消耗可觀的動(dòng)態(tài)功耗和靜態(tài)功耗(漏電),并占用寶貴的布線資源與面積。在低功耗設(shè)計(jì)中,這部分開銷變得不可忽視。
- 時(shí)序收斂與信號(hào)完整性:隨著時(shí)鐘頻率提升和工藝尺寸縮小,確保復(fù)位信號(hào)與時(shí)鐘信號(hào)一樣,在極低的偏斜和抖動(dòng)下到達(dá)所有端點(diǎn),變得極其困難。復(fù)位路徑上的串?dāng)_、電壓降(IR Drop)和工藝偏差都會(huì)影響復(fù)位釋放的同步性,可能導(dǎo)致系統(tǒng)初始化不一致。
- 多時(shí)鐘域與低功耗模式:現(xiàn)代SoC包含數(shù)十乃至上百個(gè)時(shí)鐘域,且支持動(dòng)態(tài)電壓頻率調(diào)節(jié)(DVFS)和電源門控。如何在這些復(fù)雜場景下安全、高效地管理和撤銷復(fù)位,避免跨時(shí)鐘域問題和部分掉電區(qū)域的復(fù)位失效,是一大難題。
- 測試與可觀測性:復(fù)位電路的缺陷可能導(dǎo)致系統(tǒng)性故障,但其本身難以通過傳統(tǒng)的掃描鏈進(jìn)行充分測試,需要專門的可測試性設(shè)計(jì)(DFT)策略。
復(fù)位電路的創(chuàng)新改進(jìn)方向
為應(yīng)對(duì)上述挑戰(zhàn),學(xué)術(shù)界與工業(yè)界提出并應(yīng)用了多種改進(jìn)方案:
- 復(fù)位架構(gòu)優(yōu)化:
- 分級(jí)與分區(qū)復(fù)位:取代單一的全局復(fù)位,根據(jù)功能模塊的重要性、電源域或時(shí)鐘域進(jìn)行分區(qū)。非關(guān)鍵模塊或常開模塊可以采用局部復(fù)位,僅在必要時(shí)動(dòng)作,減少不必要的功耗和干擾。
- 復(fù)位信號(hào)復(fù)用與壓縮:利用現(xiàn)有的時(shí)鐘樹或電源網(wǎng)格進(jìn)行復(fù)位信號(hào)傳輸,或采用編碼技術(shù)減少復(fù)位控制線的數(shù)量。
- 低功耗復(fù)位技術(shù):
- 復(fù)位門控:在模塊不工作或進(jìn)入休眠狀態(tài)時(shí),關(guān)閉其復(fù)位網(wǎng)絡(luò)的開關(guān),切斷動(dòng)態(tài)功耗和漏電路徑。
- 基于存儲(chǔ)器的初始化:對(duì)于大型存儲(chǔ)陣列(如SRAM),采用內(nèi)置自測試(BIST)或預(yù)載已知數(shù)據(jù)模式的方式替代硬件復(fù)位,更為高效。
- 增強(qiáng)魯棒性與可靠性:
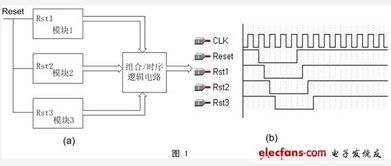
- 智能復(fù)位序列:引入片上狀態(tài)機(jī),控制復(fù)位的申請(qǐng)、同步、撤銷序列,確保不同電源域和時(shí)鐘域按正確順序完成初始化,防止競爭冒險(xiǎn)。
- 自適應(yīng)復(fù)位延遲:根據(jù)實(shí)際監(jiān)測到的電源穩(wěn)定情況或時(shí)鐘鎖定狀態(tài),動(dòng)態(tài)調(diào)整復(fù)位脈沖寬度,提升對(duì)工藝、電壓、溫度(PVT)變化的容差。
- 軟復(fù)位與局部復(fù)位:在系統(tǒng)運(yùn)行中,允許通過軟件配置對(duì)特定功能塊進(jìn)行復(fù)位,而不影響整個(gè)系統(tǒng),提升了調(diào)試和錯(cuò)誤恢復(fù)的靈活性。
- 設(shè)計(jì)與驗(yàn)證方法學(xué)改進(jìn):
- 在電子設(shè)計(jì)自動(dòng)化(EDA)工具中加強(qiáng)對(duì)復(fù)位路徑的靜態(tài)時(shí)序分析(STA)和電源完整性分析。
- 采用統(tǒng)一功率格式(UPF)等標(biāo)準(zhǔn)來規(guī)范多電壓域下的復(fù)位策略。
- 在驗(yàn)證階段,構(gòu)建全面的復(fù)位場景測試用例,包括上電、下電、異常注入等,并利用形式化驗(yàn)證檢查復(fù)位狀態(tài)機(jī)的正確性。
###
復(fù)位電路,這個(gè)看似基礎(chǔ)的功能模塊,在現(xiàn)代超大規(guī)模集成電路設(shè)計(jì)中已演變?yōu)橐粋€(gè)涉及系統(tǒng)架構(gòu)、低功耗設(shè)計(jì)、信號(hào)完整性和可靠性的復(fù)雜子系統(tǒng)。其設(shè)計(jì)不再是簡單的信號(hào)連通,而是需要從芯片頂層進(jìn)行周密規(guī)劃與協(xié)同優(yōu)化。隨著三維集成、芯粒(Chiplet)等新技術(shù)的發(fā)展,復(fù)位電路的設(shè)計(jì)將需要進(jìn)一步考慮跨芯片、跨介質(zhì)的同步與協(xié)調(diào)問題。持續(xù)的技術(shù)創(chuàng)新與方法改進(jìn),是確保集成電路巨輪在每一次啟航時(shí)都能穩(wěn)健、準(zhǔn)確朝向目標(biāo)前進(jìn)的關(guān)鍵所在。